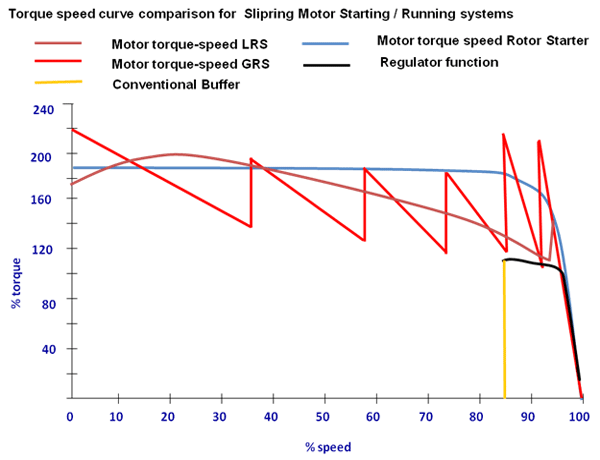
In running some applications like Cane Fibrizor, Cane Cutter, Cane Chopper, Crushers , Mixers etc. experiences frequent kick loads / variable load due to uneven raw material feeding. This leads to overloading of the motor due to insufficient motor torque & causes nuisance tripping due to over current, which affects the process & results production loss. To avoid this, 15% fixed conventional buffer resistance is kept in the Motor Rotor circuit to deliver the high torque & to limit current kicks. This is useful when the motor is loading more than 100% for short time. When there is rated load or load less than the actual rating of motor then there is no need of 15% conventional Buffer Resistance in the Motor Rotor circuit. This resistance will create continuous power loss in the form of heat loss.
Slip Regulator / Dynamic Buffer(DB) offers variable Resistance in the Rotor circuit due to slip dependent Resistance technology. When there is kick load / over load, then Slip Regulator offers Resistance instantaneously depending on slip at that load to its maximum value (upto 12 - 15%) & when the load is less than 100% of rated capacity or equal to rated capacity, then Slip Regulator offers 3 to 4% Resistance.
This reduced value of Resistance during under load will help to save the power as compared to conventional Buffer Resistance. In Rotor Resistance Starter / Controller the part of resistance is kept in the Motor Rotor circuit continuously as a Slip Regulator /